自动控制原理Matlab仿真
题目一
1 Source Code
%源代码-实验-题目1%
t = 0:0.1:12; num = [1]; %步长;传递函数分母
Zeta1 = 0.1;den1 = [1 2*Zeta1 1]; %Zeta_n即阻尼比取值
Zeta2 = 0.4;den2 = [1 2*Zeta2 1];
Zeta3 = 0.6;den3 = [1 2*Zeta3 1];
Zeta4 = 0.8;den4 = [1 2*Zeta4 1];
Zeta5 = 1;den5 = [1 2*Zeta5 1];
Zeta6 = 0.707;den6 = [1 2*Zeta6 1];
[y1,x,t] = step(num,den1,t); %构建阶跃响应函数
[y2,x,t] = step(num,den2,t);
[y3,x,t] = step(num,den3,t);
[y4,x,t] = step(num,den4,t);
[y5,x,t] = step(num,den5,t);
[y6,x,t] = step(num,den6,t);
plot(t,y1,t,y2,t,y3,t,y4,t,y5,t,y6); %将六个曲线画在一个图上
grid on;
xlabel('t/s');ylabel('c(t)');
title('Unit-Step Response of \phi(s)=\omegan^2/(s^2+2\xi\omegans+\omegan^2)')
text(2.2,1.399,' \leftarrow \xi=0.1','FontSize',13); %箭头注释阻尼比
text(2.6,1.15,' \leftarrow \xi=0.4','FontSize',13);
text(2.8,1.006,' \leftarrow \xi=0.6','FontSize',13);
text(2.8,0.9283,' \leftarrow \xi=0.707','FontSize',13);
text(2.8,0.8705,' \leftarrow \xi=0.8','FontSize',13);
text(2.8,0.7689,' \leftarrow \xi=1','FontSize',13);
str = {'\omegan=1'}; %注释Wn取值
text(1,1.7,str,'FontSize',13)
2 分析
题目要求为画二阶系统阶跃响应,故选用step相关指令。由于此处涉及到对t的显示范围和步长的设置,故应用[y0,x,t] = step(num,den,t)指令。此处num为闭环传递函数的分子。由题可知,Wn=1,故num为1,六根曲线可共用。den为分母。此处从0、1到1取6个量0.1, 0.4, 0.6, 0.7, 0.8, 1,分别用变量Zeta n来表示不同阻尼比。
Wn=1,故分母1s^2+2ξs+1,其系数分别为1,2ξ,1,故den n = [1 2*Zetan 1]。之后利用[yn,x,t] = step(num,den,t)和plot(t,y,…)来将六根曲线绘制在同一张图上。同时,题目要求进行标注,此处我采用text指令,括号内从左至右分别表示坐标、左箭头、标注内容、字体大小。通过Figure工具栏中的数据游标功能可以确定想添加注释的坐标。
3 结果
如图1-1所示。
从图中可以观察到,当阻尼比ξ位于0.1~1之间时,随着ξ的增大,有:超调量Mp%变小,故系统的稳定性变高;曲线第一次与y=1的交点不断右移,即上升时间tr变大;峰值横坐标不断右移,即峰值时间tp变大;调节时间ts变小。即阻尼比越大,时域前期响应变慢,但更快趋于稳定。
当阻尼比ξ=1时,曲线一直处于y=1下方,即没有超调。但前期响应较慢,快速性不及ξ<1时的系统。ξ=0.707时,具有较好的综合性能。
4 反思总结
联想到课程中学习的内容,在二阶系统阶跃时域响应中存在一个"最佳阻尼比"的概念,在本题目中我也将其绘制在了图中。可以看到,在最佳阻尼比的情况下,超调量很小,且响应速度也比较可观,在"快、准、稳"上有一个比较好的平衡。
另外,对于阻尼比的理解,我将其比喻为"一个反向力"。在阻尼比为0时,即任其震荡,时域响应反应为等幅震荡。随着这个"反向力"增大,其振幅的衰减会加快。当阻尼比大于等于1时,这个力便会大到直接让其不发生震荡。
题目二
1 Source Code
%源代码-实验一-题目3%
Zeta1 = 1; num1 = [1*Zeta1]; %K=1的开环传递函数分子
Zeta2 = 3; num2 = [1*Zeta2]; %K=3
Zeta3 = 5; num3 = [1*Zeta3]; %K=5
den = [1 2 3 2]; %开环传递函数公共分母
den4 = [1 2 3 3]; %K=1的闭环传递函数分母
den5 = [1 2 3 5]; %K=3
den6 = [1 2 3 7]; %K=5
num = [1]; %闭环传递函数公共分子
figure(1); %画图1
subplot(211);
sys1 = tf(num1,den); %K=1的开环传递函数
margin(sys1); %画Bode图并求裕度
subplot(212);
nyquist(sys1); %画nyquist图
grid on;
figure(2);
subplot(211);
sys2 = tf(num2,den);
margin(sys2);
subplot(212);
nyquist(sys2);
grid on;
figure(3);
subplot(211);
sys3 = tf(num3,den);
margin(sys3);
subplot(212);
nyquist(sys3);
grid on;
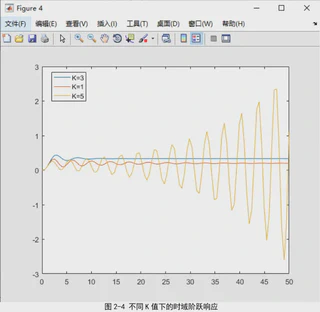
figure(4);
sys4 = tf(num,den4); %K=1的闭环传递函数
sys5 = tf(num,den5);
sys6 = tf(num,den6);
t = linspace(0,50); %横轴取值范围0到50
y = linspace(-5,5); %横轴取值范围-5到5
y1 = step(sys4,t); %构建K=1时的阶跃响应函数
y2 = step(sys5,t);
y3 = step(sys6,t);
plot(t,y1,t,y2,t,y3); %将三个时域响应函数画在一张图上
2 分析过程
由于将三个Bode图画在同一张图上容易看不清,故将k=1,3,5分别画出其Bode图与Nyquist图。
由于此处需要求出Bode图的两个裕度,故采用margin()指令,可简易完成该操作,只需分别构建margin()对象系统。分别构建k=1,3,5时的开环函数分子与分母,用sys n = tf(num,n,den)指令对传递函数进行构建。将构建好的sys1,sys2,sys3分别用margin()和nyquist()画图即可。最后,为比较时域动态性能,将三个系统的闭环函数分别构建为sys4,sys5,sys6,并用题目1中的方法画在同一张图上对比。
3.结果
如图2-1,当k=1时,由于转折频率前的幅频曲线(对数)直接与L(w)=0dB重合,由margin()指令结果可知,相位裕度为Inf,即无穷大;相位交界频率Wg=1.73rad/s,增益裕度为12dB。两裕量均为正值,故系统稳定。从下方奈氏图可以看出:
N=0 通过计算开环极点可知P=0,故 Z=N+P=0 即系统稳定。与Bode图判断相吻合。系统中频段Bode图与L(w)=0交界处斜率为0,故稳定性好。但由于wc小,其响应没那么快。
如图2-2,k=3时,右上图数据可得wc=1.56rad/s,相位裕度为17.1°,wg不变,增益裕度为2.5dB。此时,系统虽裕量不大,但仍能满足稳定要求。用对数稳定判据可得,相频曲线在wc左侧无穿越,同样可得系统稳定。从奈氏图中可以看出
N=0 同理 P=0 故 Z=P+N=0 故系统稳定。与Bode图结论吻合。系统中频段wc处以斜率-20dB/dec通过,且离斜率为0的频段较近,具有一定的稳定性,但没有k=1时稳定。wc比k=1时大,故响应变快。
如图2-3,k=5时,由图上数据可得wc=1.86rad/s,相位裕度为-9.91°,wg不变,增益裕度为-1.93dB。裕量均为负数,故系统不稳定。从奈氏图中可以看出N=2,因为绕(-1,0)顺时针转了2圈,
同理 P=0 故 Z=P+N=2不等于0 故系统不稳定。与Bode图判断吻合。系统中频段wc处以斜率-20通过,但离斜率为0的段较远,导致了系统的不稳定。wc相比k=3增大,响应更加快速。
4.反思与总结
对于中频段特性与时域动态性能的关系研究上,我还绘制了k在三个值下的时域响应曲线。可以从曲线上发现:k越大,系统响应越快,稳定性越差,调节时间越短,增益越大。但当k太大时,会出现失稳的情况,时域曲线表现为发散。如下图所示,与前面对于中频段特性的判断相吻合。
通过本实验,可以推断:欲使系统稳定,应保证Bode图上w0处斜率尽可能小,且离斜率更小的段更近,离斜率大的段更远。同时,也应使裕量更大,wc在wg左方较远处。这与教材中的结论一致。