微机原理51单片机综合实验
Oct 26, 2023
·
2 min read
题目要求
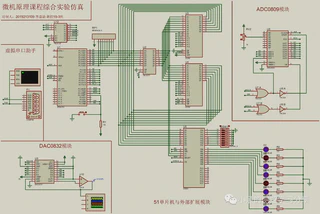
1 实验原理图
(本图片未更新,图中有错误,74LS138的G1应该连接P2.7)
2 Soure Code
;程序名称:微机原理及应用综合实验
;作者:李嘉渝
;学号:2019213109
;班级:测控19-3班
;----------------------------以下为主程序框架-------------------------------
;----------------------------以下为主程序框架-------------------------------
;----------------------------以下为主程序框架-------------------------------
ORG 0000H
LJMP INIT
ORG 000BH
LJMP ISR_T0
ORG 0013H
LJMP ISR_INT1
INIT:
LCALL INIT_T0 ;初始化定时器0
LCALL INIT_INT1 ;初始化按键中断1
LCALL INIT_UART ;初始化串口
MOV R5,#0
MOV R7,#100
MAIN:
JNB F0,$ ;若F0为1,则主程序可执行
LCALL ADC_TO_R6 ;ADC采样,将采样数据存R6
LCALL ADC_TO_RAM ;将R6中存储的ADC数据存到片外RAM0500H-050AH单元中
LCALL READ_N_OPE ;读PA口状态,将读数与AD转换结果做异或运算,结果存储至40H单元中
LCALL DAC0832 ;取40H单元数送DAC0832转换
LCALL UART_SEND ;串口发送R6和40H单元的数值
CLR F0
SJMP MAIN
ISR_T0:
MOV TH0,#0FCH
MOV TL0,#66H ;定时1ms
DJNZ R7,NEXT_T ;不到0.1s直接返回主程序
MOV R7,#100 ;0.1s时重新赋值
SETB F0 ;使F0=1,可以进入程序执行主体
NEXT_T:
RETI
ISR_INT1:
CPL TR0
RETI
;----------------------------以下为封装函数-------------------------------
;----------------------------以下为封装函数-------------------------------
;----------------------------以下为封装函数-------------------------------
;------------------------------------------------------------------------
;函数名称:INIT_T0
;函数功能:初始化配置定时器0与其中断,使之每1ms进入一次中断
;函数说明:
;------------------------------------------------------------------------
INIT_T0:
ORL TMOD,#01H ;定时器1设置为8位自动重装,定时器0设置为16位模式1
MOV TH0,#0FCH
MOV TL0,#66H ;定时1ms
SETB ET0 ;开启定时器0中断
SETB EA ;开启总中断
SETB TR0 ;启动定时器0
RET
;------------------------------------------------------------------------
;函数名称:INIT_INT1
;函数功能:初始化按键1中断
;函数说明:
;------------------------------------------------------------------------
INIT_INT1:
SETB EX1 ;开启按键1中断
SETB PX1 ;调整使INT1中断最高优先级,这样在定时器0中断时也可以触发按键中断
SETB IT1 ;下降沿触发
RET
;------------------------------------------------------------------------
;函数名称:INIT_UART
;函数功能:初始化串口
;函数说明:波特率9600
;;------------------------------------------------------------------------
INIT_UART:
ORL TMOD,#20H
MOV SCON,#40H ;配置串口输出模式
MOV TH1,#0FDH
MOV TL1,#0FDH ;配置定时器1串口波特率为9600,默认SMOD=0
SETB TR1 ;开启定时器1
RET
;------------------------------------------------------------------------
;函数名称:ADC_TO_R6
;函数功能:ADC采样,将采样数据存R6
;函数说明:采用数据总线连接方式,端口地址为C000H
;------------------------------------------------------------------------
ADC_TO_R6:
MOV DPTR,#0C000H ;送ADC0809端口地址
MOV A,#2 ;送IN2通道地址
MOVX @DPTR,A ;锁存通道地址并启动A/D
NOP
NOP
JNB P3.2,$ ;等待ADC转换完成
MOVX A,@DPTR ;读ADC转换数据
MOV R6,A ;将转换数据放入R6当中
RET
;------------------------------------------------------------------------
;函数名称:ADC_TO_RAM
;函数功能:将R6中存储的ADC数据存到片外RAM0500H-0509H单元中
;函数说明:每进一个数据,所有数据往左移一位,原0500H数字被挤掉,新进的数字放在0509H中
;------------------------------------------------------------------------
ADC_TO_RAM:
MOV R1,#9 ;搬移数据9次
MOV R0,#01H ;转移对象指针
MOV R3,#00H ;转移目标指针
LOOP:
MOV DPTR,#0500H ;赋起始地址
MOV DPL,R0 ;加上转移对象指针,指向被转移对象
MOVX A,@DPTR ;取数至ACC
MOV DPL,R3 ;指向被转移目标
MOVX @DPTR,A ;转移完成
INC R3
INC R0 ;下一次转移
DJNZ R1,LOOP
MOV A,R6 ;将ADC转化结果放到ACC
MOV DPTR,#0509H
MOVX @DPTR,A ;存至第十个单元
RET
;------------------------------------------------------------------------
;函数名称:READ_N_OPE
;函数功能:将ADC数据送至PB口。读PA口状态,将读数与AD转换结果做异或运算,结果存储至40H单元中。
;函数说明:端口地址B000H
;------------------------------------------------------------------------
READ_N_OPE:
MOV A,#99H ;8255选择模式0,A口输入,B口输出,C口输入
MOV DPTR,#0B003H ;CONTROL口地址
MOVX @DPTR,A ;将控制字写给CONTROL口
MOV DPTR,#0B001H ;PB口地址
MOV A,R6
MOVX @DPTR,A ;将R6的数送PB口
MOV DPTR,#0B000H ;PA口地址
MOVX A,@DPTR ;读取PA口地址至ACC
MOV B,A ;PA口数据暂存B
MOV A,R6 ;取AD转换结果
XRL A,B ;做异或运算
MOV 40H,A ;结果保存至RAM40H单元中
RET
;------------------------------------------------------------------------
;函数名称:DAC0832
;函数功能:取40H单元数送DAC0832转换
;函数说明:端口地址D000H
;------------------------------------------------------------------------
DAC0832:
MOV A,40H
MOV DPTR,#0D000H
MOVX @DPTR,A
RET
;------------------------------------------------------------------------
;函数名称:UART_SEND
;函数功能:串口发送R6和40H单元的数值
;函数说明:
;------------------------------------------------------------------------
UART_SEND:
MOV A,R6
MOV SBUF,A
JNB TI,$
CLR TI ;串口发送R6数值
MOV A,40H
MOV SBUF,A
JNB TI,$
CLR TI ;串口发送40H单元数值
RET
END